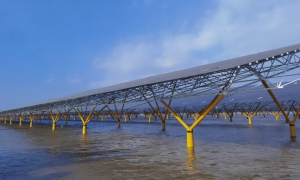
7月9日,武船集团北船重工青岛武船承建的首艘RSV水下机器人支持船经过14天的二次试航完成所有海上航行试验项目,顺利靠泊码头。
RSV-1#船作为海洋工程水下作业用途船舶,其动力定位系统的复杂程度远远高于以往承制的平台供应船要求,该船同时具备DYNPOS AUTR (具有技术设计冗余的自动定位系统)和DYNPOS E(动力定位无分隔增强可靠性)两个入级符号


7月9日,武船集团北船重工青岛武船承建的首艘RSV水下机器人支持船经过14天的二次试航完成所有海上航行试验项目,顺利靠泊码头。
RSV-1#船作为海洋工程水下作业用途船舶,其动力定位系统的复杂程度远远高于以往承制的平台供应船要求,该船同时具备DYNPOS AUTR (具有技术设计冗余的自动定位系统)和DYNPOS E(动力定位无分隔增强可靠性)两个入级符号